
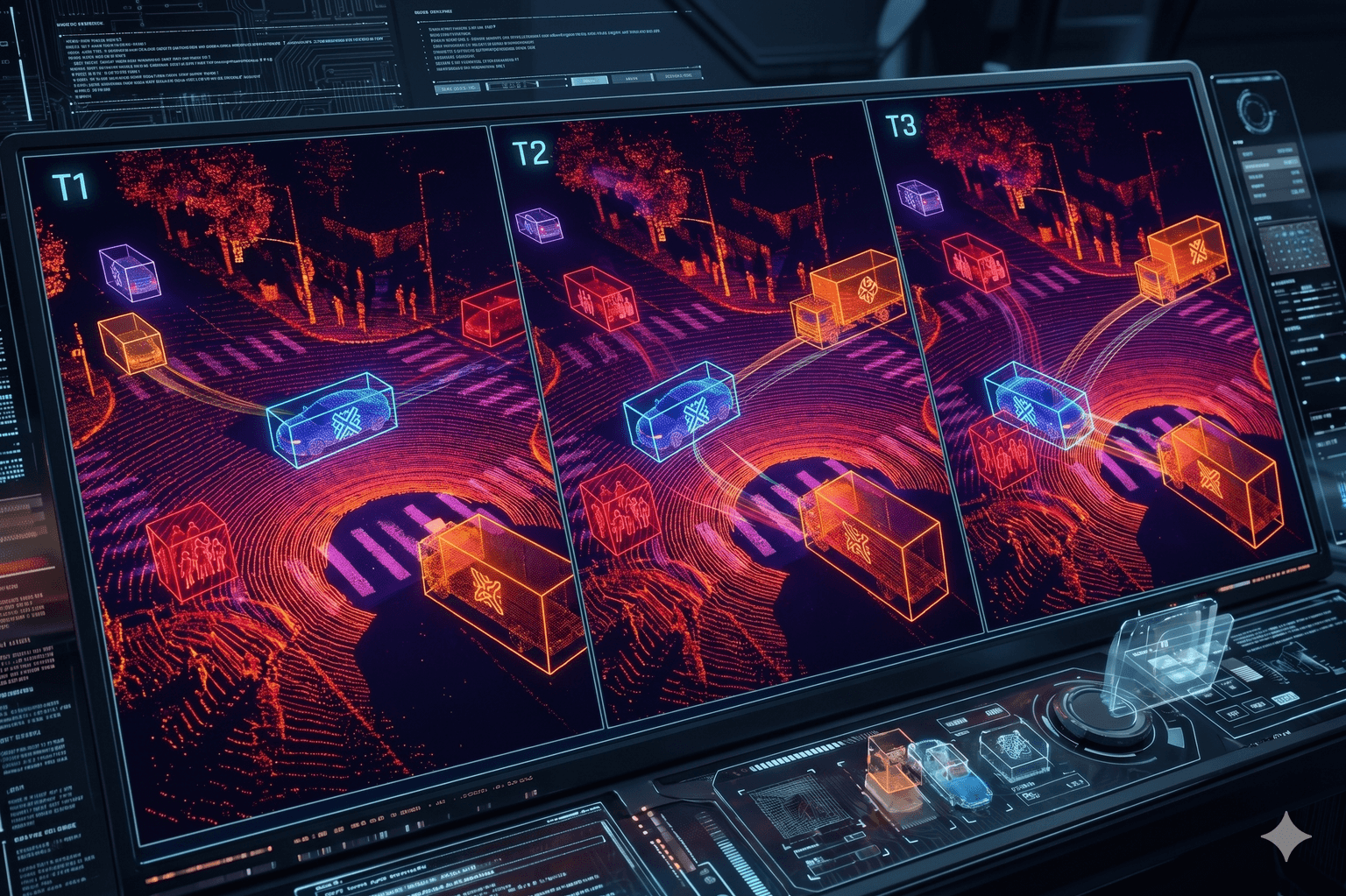
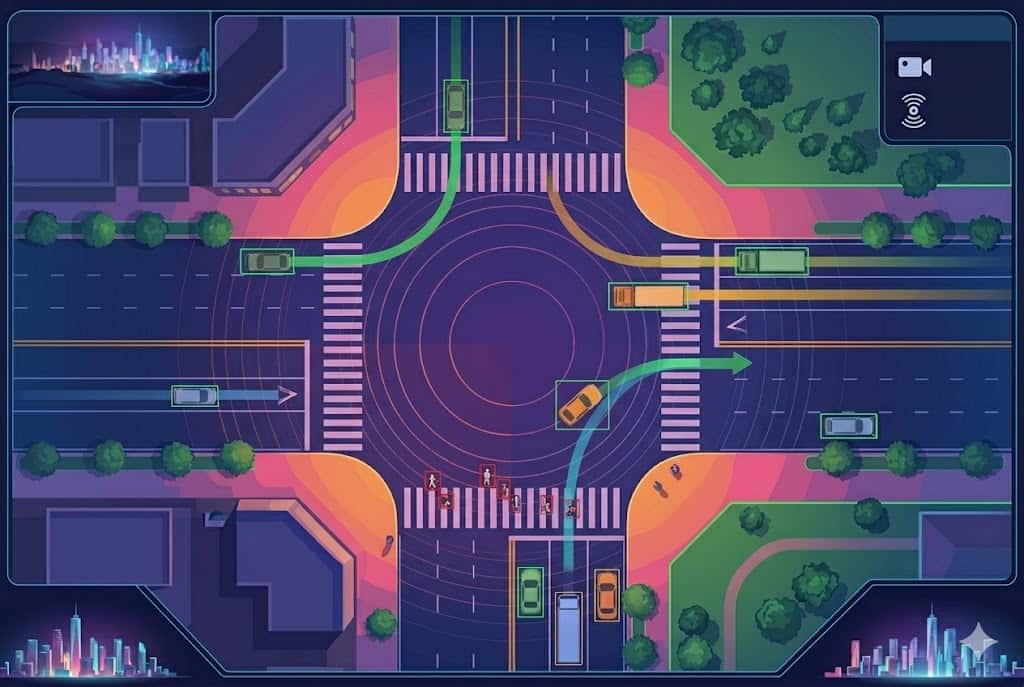
3D Cuboid Annotation
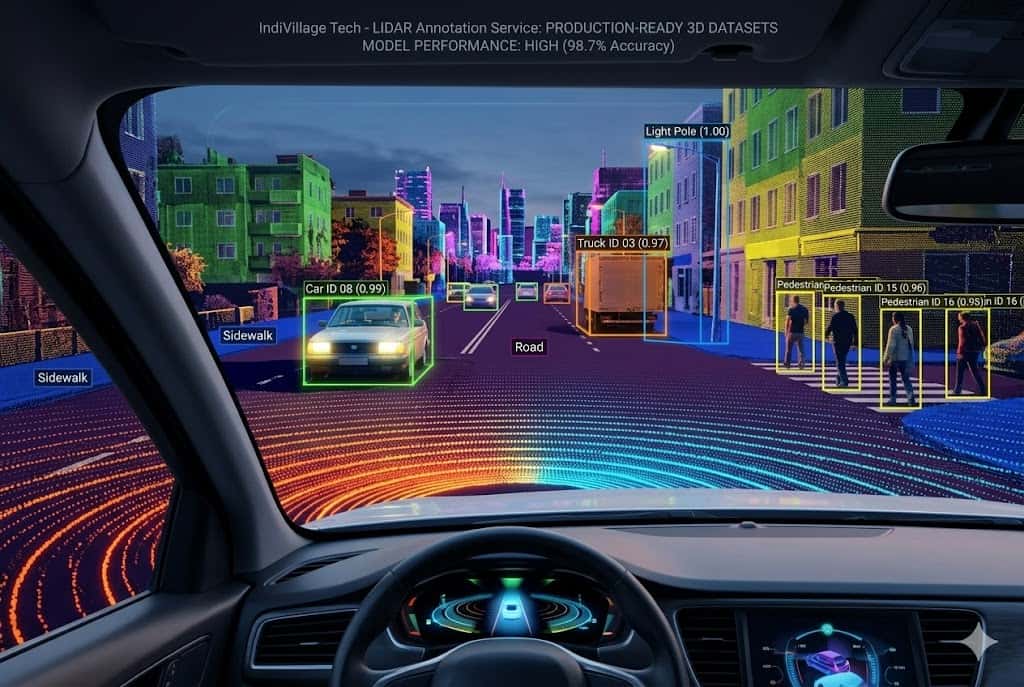
We annotate vehicles, pedestrians, cyclists, road objects, equipment, infrastructure, and other objects of interest using accurate 3D cuboids. Each cuboid is reviewed for position, depth, orientation, and spatial fit within the point cloud. This helps perception models learn not only what an object is, but where it exists in 3D space.













.png&w=1536&q=60)
.png&w=1536&q=60)

.png&w=1536&q=60)
.png&w=1536&q=60)