
Images & Video
RGB and depth for robot vision.
Learn More ->
Industry
Robotics data is messy: motion blur, occlusions, reflective surfaces, dynamic lighting, rare edge cases, and multi-sensor streams. IndiVillage Tech delivers robotics training data through precision-built annotation workflows that ensure consistency across time, sensors, and edge cases - helping robots see, localize, navigate, and manipulate reliably beyond the lab and into real-world environments.









RGB and depth for robot vision.
Learn More ->
LiDAR / depth sensors for scene understanding and navigation.
Learn More ->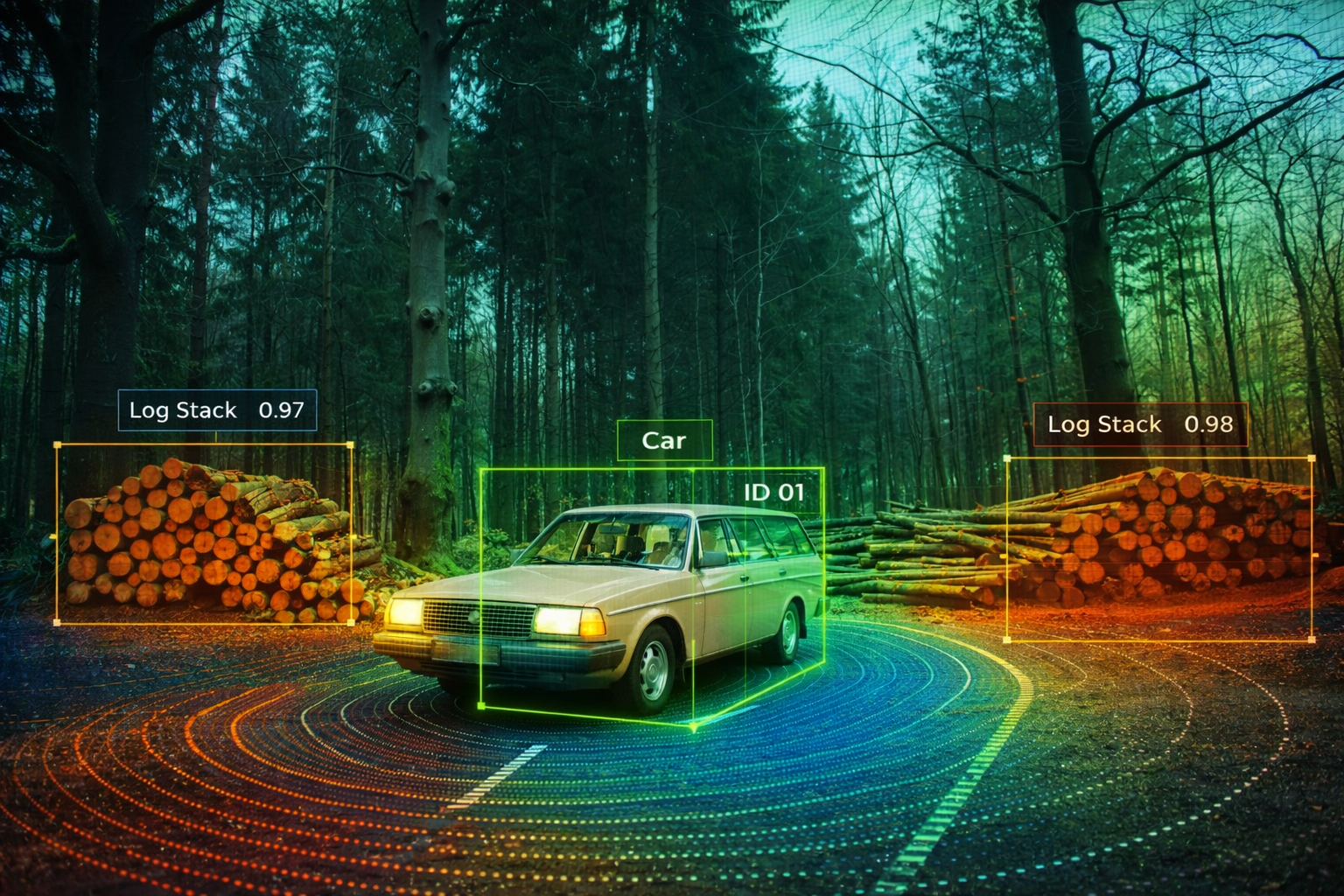
LiDAR + camera alignment to reduce uncertainty in navigation.
Learn More ->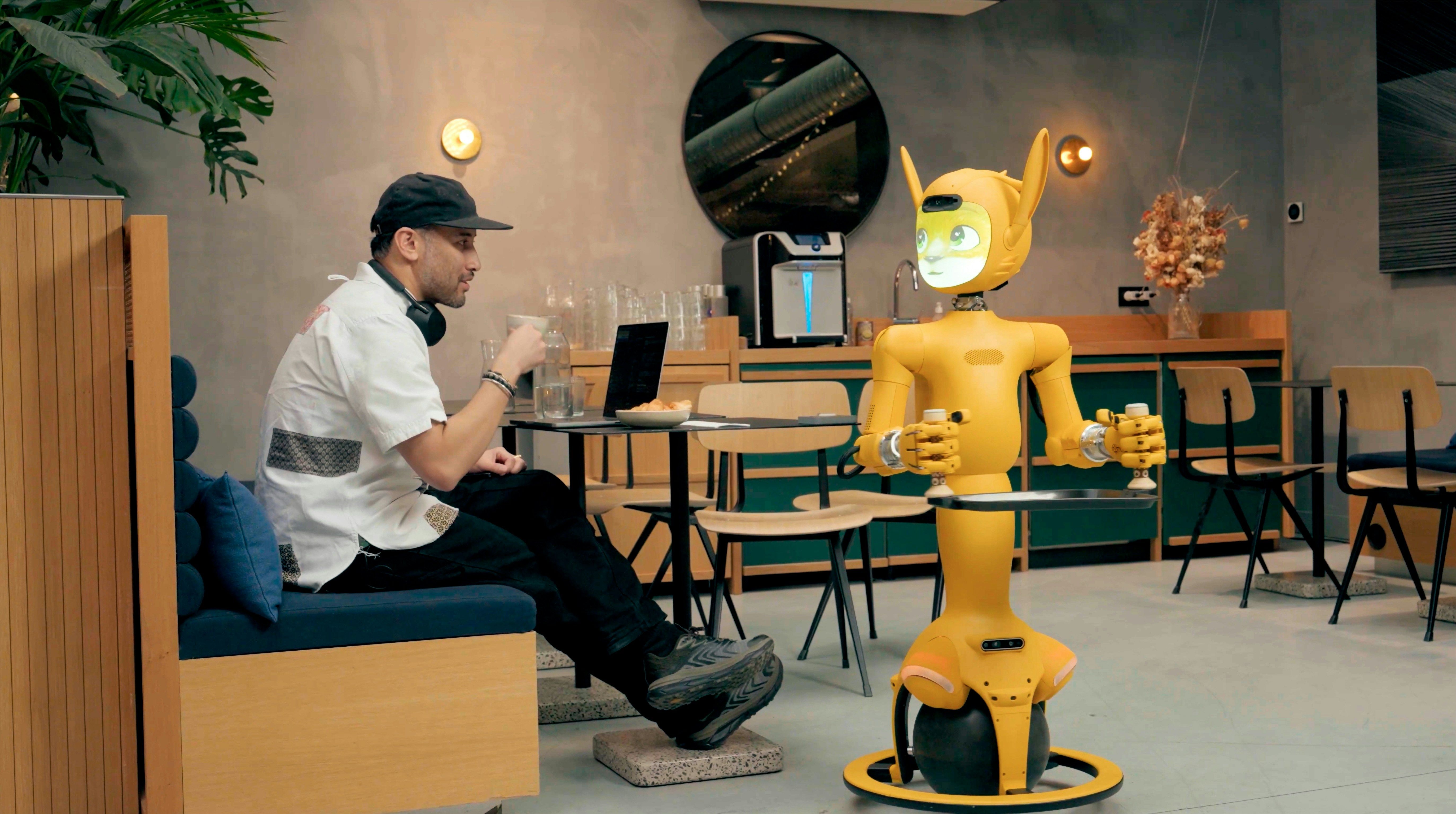
Voice commands, intent, and human-robot interaction workflows when relevant.
Learn More ->
Bounding boxes + track IDs for moving objects, pick paths, forklifts, totes, pallets, hands/tools, etc.

3D boxes, point-level labels, and scene geometry to train navigation + avoidance.

Pixel-/point-perfect masks for free space, obstacles, parts, defects, lanes/aisles, and material classes. Panoptic = semantic + instance.

Keypoints on hands, tools, joints, fixtures, objects - useful for grasping, alignment, and HRI.

Synchronized labels across modalities for higher consistency and less reconciliation effort.

We help define label classes, boundary rules, and hard case handling so teams do not relabel the same ambiguity forever.
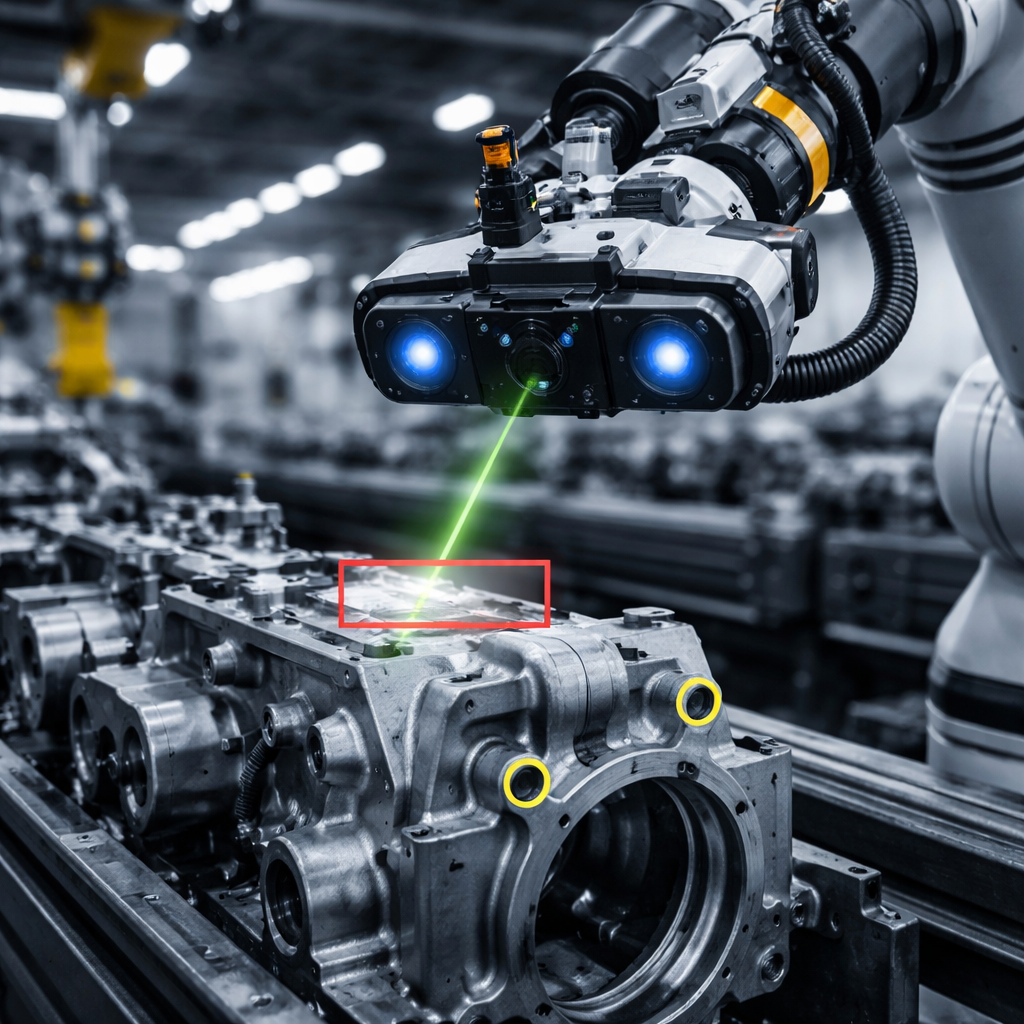
Defect detection and surface anomaly labeling for parts, components, and finished goods. Assembly-line object recognition with precision annotations for automated inspection workflows.
Conveyor-belt object detection and classification for robotic sorting systems. High-accuracy labeling for bin picking, parcel handling, and warehouse automation.
2D and 3D annotations for free space, obstacles, lanes, and dynamic objects. Indoor and outdoor robotics training data for safe navigation in real-world environments.

Keypoints, segmentation masks, and pose estimation for grasp planning. Fine-grained object boundary labeling to improve robotic precision and task success rates.
Robotics across industries is increasingly powered by AI perception, navigation, and decision-making. We support teams with high-accuracy ground truth, multi-sensor labeling, and QA-led workflows that reduce deployment risk and speed up production autonomy.

Medical image annotation, organ/tissue segmentation, and pose/keypoints for surgical and hospital automation.

2D bounding boxes + tracking, LiDAR/3D point cloud labeling, and QA for navigation and object handling.

Indoor semantic segmentation, map annotation, and edge-case tagging for low light, clutter, and tight spaces.

Sensor fusion labeling, object detection, and ground-truth workflows for outdoor navigation and curbside scenarios.
Human interaction labeling and conversational AI evaluation for safe navigation and guest-facing experiences.
Multispectral/drone imagery tagging, vegetation segmentation, and weed vs crop annotation.

Site segmentation, object classification + tracking, LiDAR/3D labeling, and machinery identification.

Defect detection and industrial anomaly labeling for inspection, assembly, and cobots.

No gig marketplaces. Structured teams guided by experienced leads across 11 tech centers, delivering calibrated 2D/3D and LiDAR workflows with accountable QA. Backed by 99%+ annotation accuracy and 500M+ data points annotated for 20+ enterprise AI clients.

Guideline engineering, multi-pass reviews, gold sets, and drift monitoring built into every robotics dataset - ensuring consistency across frames, sensors, and edge cases.

COCO, YOLO, KITTI, or custom schemas - aligned to your robotics perception, navigation, and sensor fusion stack without operational friction.

Controlled environments, compliant processes, and a socially responsible workforce model - combining production-grade rigor with measurable social impact.

From pilot validation to high-volume annotation for autonomy systems - without quality drop-off.

Robotics models are sensitive to label noise - especially on boundaries, occlusions, and motion. Our QA stack is designed to catch the stuff that breaks autonomy.
Multi-tier review + specialist QA (double-pass, escalation rules).
Consensus scoring and consistency checks.
Edge-case protocols (rare events, ambiguous classes, boundary rules).
Active feedback loops so guidelines tighten over time (less rework, fewer re-label cycles).
Work performed in managed, in-house centers with controlled access.
Practices aligned to HIPAA, GDPR, and SOC2-aligned workflows.
NDA-first onboarding and role-based access options.

taxonomy + sample batch + QA report
throughput ramp with weekly quality calibration
dashboards, audits, edge-case reviews, continuous improvement
COCO / YOLO / KITTI / custom JSON + whatever your ML pipeline expects (tool-agnostic)
Share a small sample or a spec. We'll return a pilot plan with taxonomy, sample batch outputs, QA checks, and delivery-ready exports.
Quick answers to help you make smarter, faster decisions with confidence
Robotics annotation labels images, video, and sensor data, including LiDAR point clouds, to train models for perception, navigation, and manipulation.
Yes, teams can label LiDAR and camera together for consistent annotations across modalities, reducing uncertainty in navigation.
Common needs include object detection, tracking, semantic and instance segmentation, keypoints, and 3D point cloud labeling.
Yes, class definitions, boundary rules, edge-case handling, and QA acceptance criteria are part of the kickoff so labeling stays consistent at scale.
We use layered QA, consensus checks, reviewer training, and edge-case protocols, especially for motion, occlusion, and boundary precision.
We deliver annotations in COCO, YOLO, KITTI, custom JSON, or any custom schema mapped to your model and training stack.
Yes. For sensor fusion workflows, we support synchronized LiDAR and camera annotation and maintain consistency across modalities and time.
Yes. We label sequences for object tracking and apply QA checks for cross-frame consistency, occlusion handling, and temporal coherence, which is critical for navigation and autonomy.
Yes. We support keypoints, pose estimation, and manipulation-focused labels such as grasp-relevant regions depending on your task definition and success metrics.
Any one of the following is enough to begin: a small sample dataset, your current label schema or taxonomy, or model failure modes you want labels to address. We'll propose the pilot plan, QA gates, and export format.
Tell us about your AI data requirements and our team will help map the right workflow.